自动控制原理 课后习题 3-16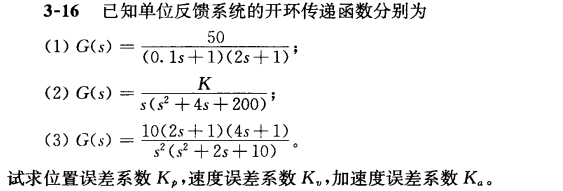
知识点窍:位置误差系数$K_p$、速度误差系数$K_v$、加速度误差系数$K_a$
逻辑推理:根据误差系数的定义式
K_p=\lim\limits_{s\to 0}G(s)H(s)
原文链接: 自动控制原理 课后习题 3-16
自动控制原理 课后习题 3-16
知识点窍:位置误差系数$K_p$、速度误差系数$K_v$、加速度误差系数$K_a$
逻辑推理:根据误差系数的定义式
K_p=\lim\limits_{s\to 0}G(s)H(s)
原文链接: 自动控制原理 课后习题 3-16

